Ubiquitous Robotic Technology for Smart Manufacturing System
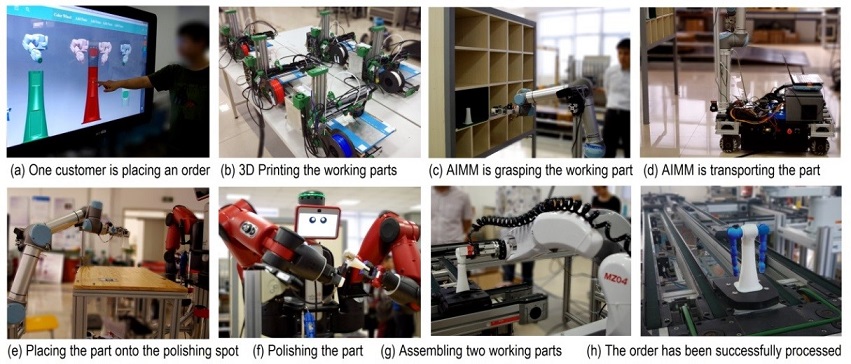
As the manufacturing tasks becoming more individualized and more flexible, the machines in smart factory are required to do variable tasks collaboratively without reprogramming. This study for the first time discusses the similarity between smart manufacturing systems and the ubiquitous robotic systems, and makes an effort on deploying ubiquitous robotic technology to the smart factory.
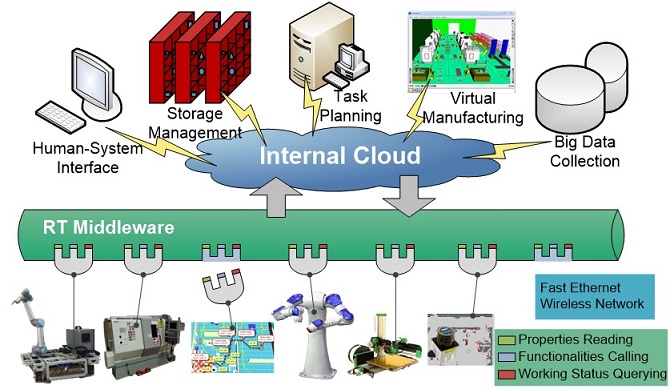
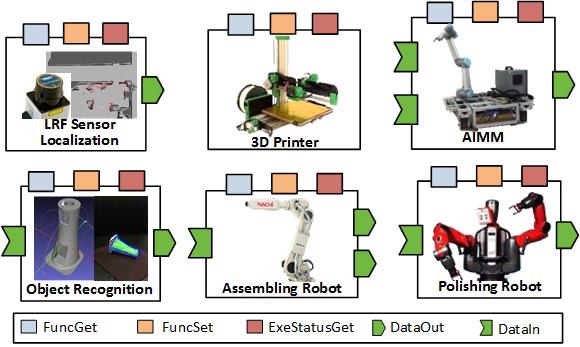
Specifically, a component based framework is proposed in order to enable the communication and cooperation of the heterogeneous robotic devices. Further, compared to the service robotic domain, the smart manufacturing systems are often in larger size. So a hierarchical planning method was implemented to improve the planning efficiency.
A test bed of smart factory is developed. It demonstrates that the proposed framework is suitable for industrial domain, and the hierarchical planning method is able to solve large problems that intractable with flat methods.